Method 3 uses the Approximate Cell Decomposition method to generate the map of the workspace. To consider both position and orientation, CBi of Bi is generated by calculating all the obstacle spaces using every robot possible orientation. You can see the layers of CBs around each obstacle in the Figure below.
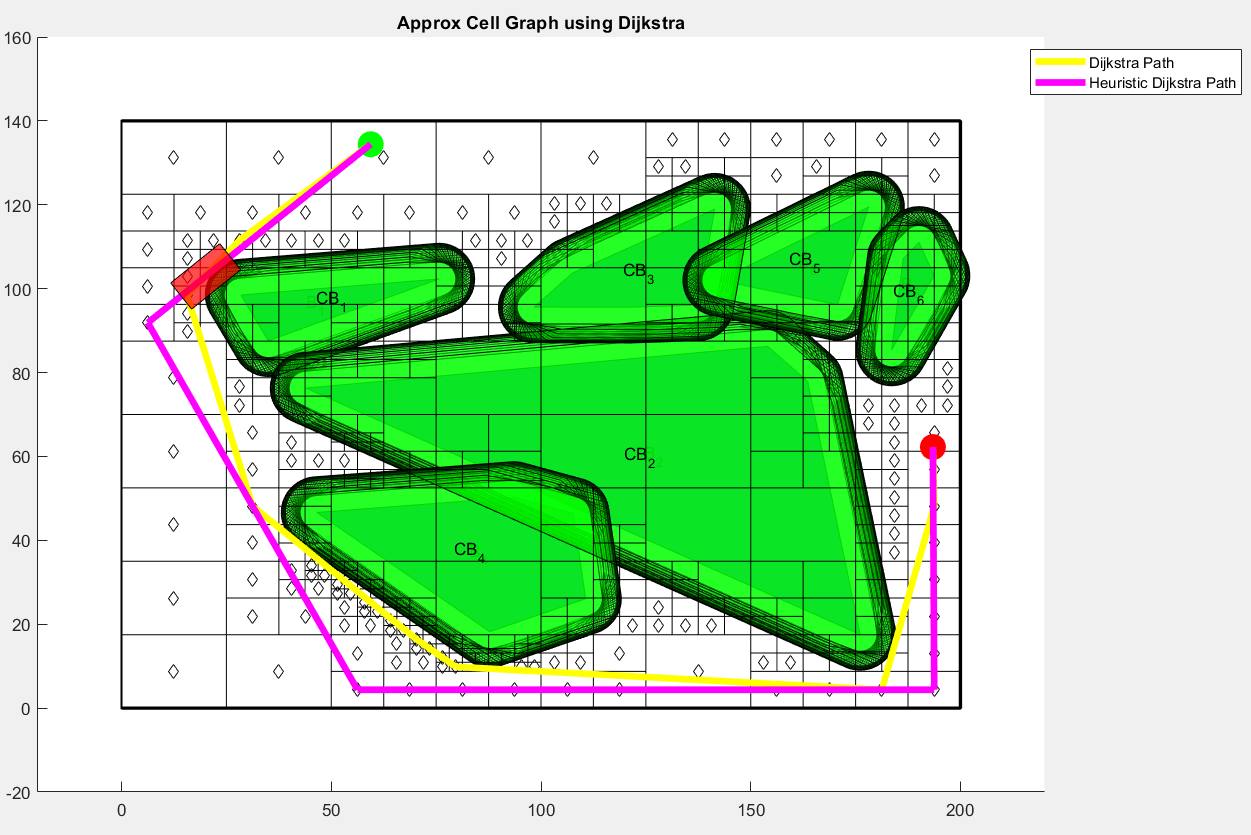
Then using Approximate Cell Decomposition, the map is broken down into grids that show if a space is occupied or free. Using the adjacency matrix generated from the decomposition of the workspace, the new Dijkstra algorithm is applied to find the shortest path from initial position to goal.
For each part of the path the orientation is calculated using the ‘atan2’ function. This function will find the angle between the robot’s current orientation and the paths. Using this function also keeps the angle between pi and -pi allowing the rotation to be directional and short.
Lastly, the robot is animate along the planned path using differential drive mechanics and orientation. The robot considers omega the rotational velocity when rotating at robots’ position. Then after aligning with the next path the robot moves forward, translating the position based on the velocity. All speeds are calculated using the time step. The rotation was acting weird, so I had to remove the omega portion.
.